Robot 3S-1 a three-servo biped walker |
This project is my first attempt to make a biped walker — and using only three servos. 3S-1 (for Three-Servo walker One) is modelled loosely after the VStone RB300, as seen in their gallery and discussed in this RoboSavvy thread.
The basic idea is that there are little protrusions along the inside edge of each foot, on the bottom. This means that, with a small shift of weight, the whole robot will tip over onto that foot, bringing the other foot up off the floor so that it can move. Then we shift weight back to the other foot, and repeat. So we need just one servo for each leg, and one more to shift weight. Ideally, the third servo also servos other functions, like knocking around the other guy in a boxing match, or helping the robot to stand after it's knocked down.
The RB300 shifts weight via a front plate that it rotates in a vertical plane in front of it. I'd like to try a different arrangement, with the weight on top, perhaps attached to a set of arms, rotating in the horizontal plane.
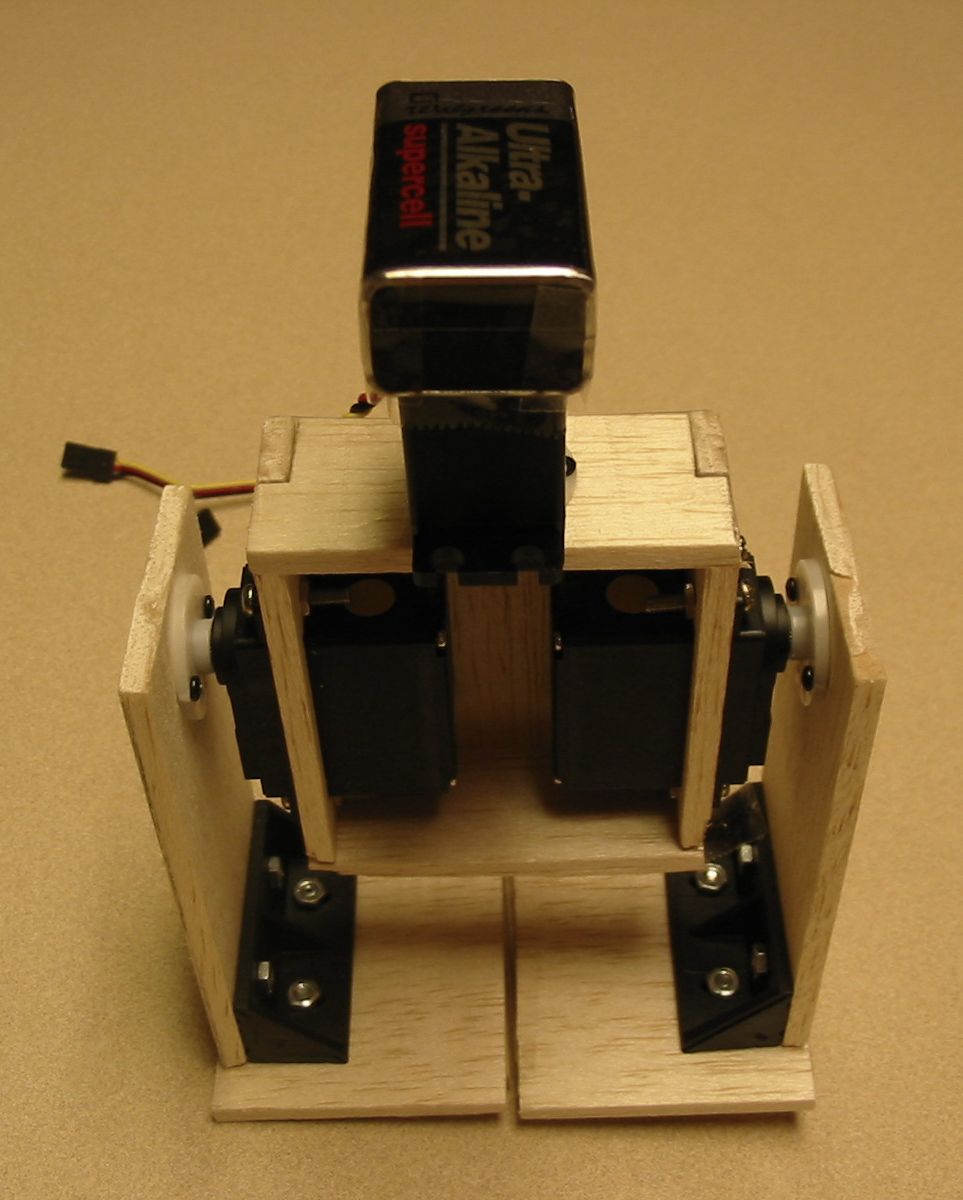
My first prototype is shown at right.
Construction: The body is made of 5 mm balsa wood, cut with a hobby knife. This was my first time working with balsa, and I found it to be a pretty friendly material -- easier to cut cleanly than foamboard, and probably stronger too. It did take longer to work than I expected, however; the robot shown was about four or five hours of work.
The joints in this prototype are all held together with packing tape, except for the feet, which are held on with wide angle brackets, screws, and nuts. Yes, the packing tape is weak and cheesy, but it has the great advantage of being easily removable (it readily lets go of the balsa). I was mostly making this design up as I went along, and several times needed to remove a part to make additional cuts. If I were going for a more permanent build, I'd certainly replace the tape with glue.
Servos: I'm using two HS-475HB's for the legs, and a HS-325HB for the head. The balsa is mounted directly to the standard nylon servo horns, using #2 tapping screws.
Electronics: This prototype doesn't have any, except for what's in the servos. For testing, I hooked the servo leads up to a Pololu micro serial servo controller, connected to my Powerbook. The idea is that eventually, this controller (and some combination of master controller and wireless serial receiver) would be mounted within the body of the bot. Power for the controller(s) would come from the 9V atop the bot's head, and power for the servos would come from a 4-AA battery pack bolted onto its back.
Results: The head servo, even with a 9V battery strapped on top, doesn't shift enough weight to make the bot tip over onto one foot. However, I had already planned to add an "arm" plate to that top servo, which should give it considerably more leverage; I just ran out of time for this prototype.
A bigger problem is that the foot shape is not yet right. Even when tilted over onto one foot, 3S1-a1 can't quite lift the other foot (in either direction) without it scraping the floor. This is a case where the foot certainly can be too big! It's not hitting the floor very much — though it's hard to see in the picture above, the raised foot is actually not touching the floor at that point. So I think a little more effort in optimizing the foot design can make it work.
Conclusion: This is a promising approach, and not too bad for a first prototype. I plan to pursue this idea further. The result should be a pretty capable biped at a remarkably low price.